Dataset
Single-Object Multi-Stage Manipulation Task
Full Dataset (545Gb)
Multi-Object Multi-Stage Manipulation Task
Assembly 1 (86Gb)
Assembly 2 (77Gb)
Assembly 3 (70Gb)
Data Format
Each zip file contains a folder of trajectories. Each trajectory is saved as a.npy file. Each
.npy file
condtains a dictionary with the following keys value pairs:
obs/side_1a (N, 256, 256, 3) numpy array of RGB images from the side camera 1 saved in BGR formatobs/side_2a (N, 256, 256, 3) numpy array of RGB images from the side camera 2 saved in BGR formatobs/wrist_1a (N, 256, 256, 3) numpy array of RGB images from the wrist camera 1 saved in BGR formatobs/wrist_2a (N, 256, 256, 3) numpy array of RGB images from the wrist camera 2 saved in BGR formatobs/side_1_deptha (N, 256, 256) numpy array of depth images from the side camera 1obs/side_2_deptha (N, 256, 256) numpy array of depth images from the side camera 2obs/wrist_1_deptha (N, 256, 256) numpy array of depth images from the wrist camera 1obs/wrist_2_deptha (N, 256, 256) numpy array of depth images from the wrist camera 2obs/tcp_posea (N, 7) numpy array of the end effector pose in the robot's base frame (XYZ, Quaternion)obs/tcp_vela (N, 6) numpy array of the end effector velocity in the robot's base frame (XYZ, RPY)obs/tcp_forcea (N, 3) numpy array of the end-effector force in the end-effector frame (XYZ)obs/tcp_torquea (N, 3) numpy array of the end-effector torque in the end-effector frame (RPY)obs/qa (N, 7) numpy array of the joint positionsobs/dqa (N, 7) numpy array of the joint velocitiesobs/jacobiana (N, 6, 7) numpy array of the robot jacobianobs/gripper_posea (N, ) numpy array of indicating the binary state of the gripper (0=open, 1=closed)actiona (N, 7) numpy array of the commanded carteasian action (XYZ, RPY, gripper)primitivea (N, ) numpy array of strings indicating the primitive associated with the current timestepobject_id (Multi-Object only)a (N, ) numpy array of integers indicating the ID the object being manipulated in the current trajectoryobject_info (Single-Object only)a dictionary contain information of the object being manipulated in the current trajectory with the following keys-value pairslengthlength of the object (Short, Long)sizecross-sectional size of the object (Small, Medium, Large)shapeshape ID of the object according to reference sheetcolorcolor ID of the object according to reference sheetangleinitial pose of the object indicating how it should be grasped and reoriented (horizontal, vertical)distractorindicator for whether there are distractor objects (yes, no)
File Naming
The Single-Object Dataset trajectory files are named as following:(insert_only_){shape}_{size}_{length}_{color}_{angle}_{distractor}_{trajectory_id}.npyThe Multi-Object Dataset trajectory files are named as following:
trajectory_{object_id}_{trajectory_id}.npyUsing Point Clouds
The camera intrinsics are provided in the files below. They can be used to convert the depth images to point cloud for your application.- Side Camera 1 Intrinsics
- Side Camera 2 Intrinsics
- Wrist Camera 1 Intrinsics
- Wrist Camera 2 Intrinsics
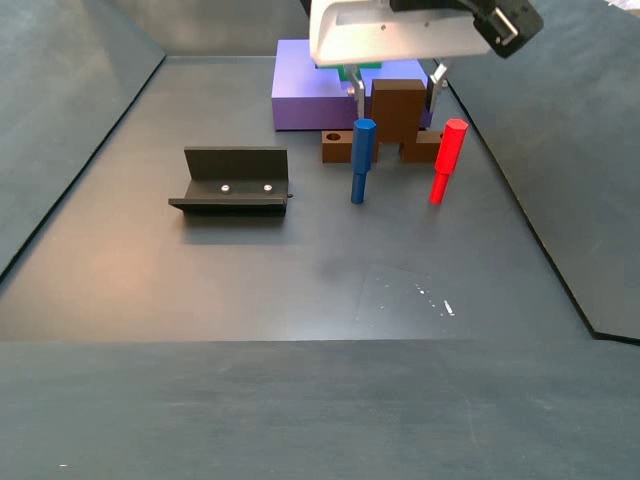
RGB Image
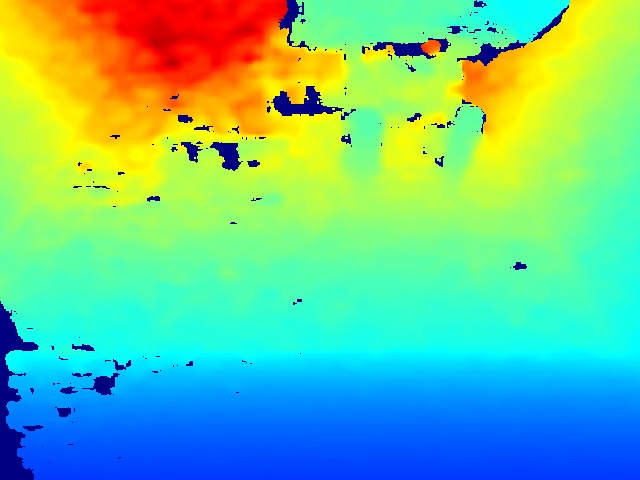
Depth Map
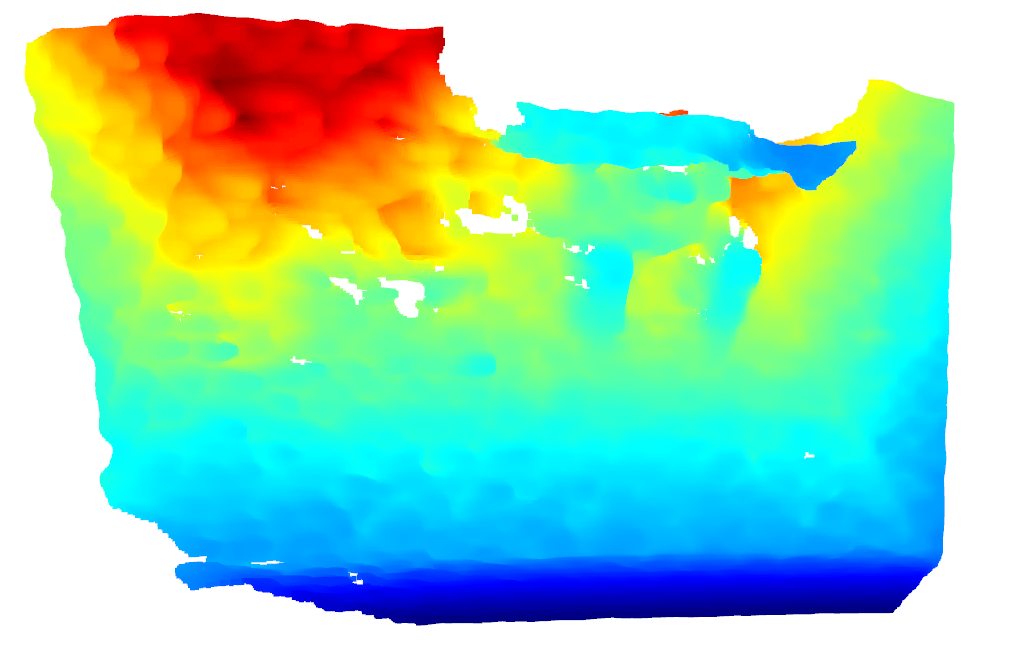
Point Cloud